
灵动科技新里程:全能型仿生机器人实现三大关键跨越
一、全局协同:超越独立模块,达成整体智能调控
过往机械体在移动时往往显得刻板而脱节,各个部分如同独立运行,欠缺统一配合。新一代仿生机器人凭借一体化协同操控系统,从根本上改变了这一局面。即使在仰面姿态下,它也能通过全身协调自主完成从卧姿到站立的完整过程。这一出色的自我复位表现,既体现了其运动策略的系统性,也大大加强了在非常规环境中的响应与适应水平。
躯干中段的主动调控能力,是实现其敏捷运动的重要一环。区别于以往相对固定的中段设计,该机器人在进行急速转体、抬腿等动作时,其腰腹部会主动参与平衡调节与动力传递。这不仅提升了运动效能,更赋予其类似生命体的姿态预适应能力,为持久、高强度的任务执行创造了条件。
该机器人的动作分解与重组功能,进一步释放了其工作潜力,为其在多样化环境中处理复合型任务提供了关键支撑。
二、动态稳定:应对突发冲击,确保全时可靠运行
除了协调性,实际运用的核心在于多变条件下的平衡保持。该机器人不仅能在静止时维持稳定,更可在高速动作变换与外部冲击中,保持连贯而从容的运动状态。
它在进行快速蹲起、侧向踢高等大幅动作时,身形依然扎实。即便在测试中突遇泼水,其动作序列也未出现中断或失衡,显示出卓越的抗扰动性能。这套迅速响应与恢复的机制,依赖于多部位(尤其是躯干)的实时调整。在动作收尾瞬间,系统能通过关节间的紧密配合,快速化解剩余晃动,恢复到平稳待机状态。
配合高级别的整体防护构造,其稳定表现得以从室内延伸至户外,不论是偶然溅湿、扬尘或是多变天气,均能持续可靠工作。它所致力实现的,是一种可应对各类条件、持续稳定运行的全天时平稳性能。
三、动作连贯:类人化韵律进阶,平滑转换多级指令
通过该机器人演示传统拳法可见,其动作连贯度获得显著提升。先前机械体在完成复杂动作组合时,环节衔接处常有轻微停滞或角度重设,带来明显的断续感。而现在,它在动作过渡中显得更加柔顺,整体运行呈现出更接近自然的韵律与流动感。这一提升得益于系统能够在更小时时间单位内调和关节活动,达成动力分配与路径优化,从而承载起拟人化的流畅动作连接。
运动效能的不断升级,最终指向实际应用场合。它稳健的移动性能与运动体系深度结合,推动其迈向“行进间操作”的融合阶段。同时,感知功能已融入控制回路。依托光学探测系统,该机器人能够实时调整步态,在阶梯等复杂地面上实现精确落足与自主避障,表现出优越的环境交互与自适应能力。
该仿生机器人的核心长处,在于其运动表现、环境感知与复杂场景任务需求的高度统一。这一统一构建了一套“侦测—判断—动作”的循环体系。未来,借助算法优化与经验积累,它将实现“愈用愈敏捷”的持续成长,为货物转运、设施巡查、紧急救援等多类复杂场合提供可进化、可适配的智能解决途径。
此项技术进展,标志着仿生机器人正从“实验阶段”走向“实地应用”。其所建立的“整体协作、动态维稳、流畅操作”的能力框架,不仅应对了真实复杂环境中“立得牢、行得稳”的基础课题,更解决了“可操作、有效率”的实践命题。该机器人验证了“全时可靠运行 + 高敏捷运动调控”的技术方向,为在多变场景中的广泛运用奠定了扎实根基,切实开启了从“技术演示”到“实际贡献”的行业新阶段。
更多文章
-

浙江科创格局焕新:企业梯队成势 创新生态跃升
当时间的指针行至2025年末,浙江的创新图景正在经历一场深刻的演化。年初,一组被称为“杭州六小龙”的科技企业崭露头角,以其突破性的技术与市场表现,拉开了这一年的序幕。它们的集体涌现与稳健成长,不仅成为年度热词,更标志着一个以高潜力科技企业为主角的发展新篇章已然开启。然而,故事并未止步于此。在虚拟现实、智
-

沪举办智能教育研讨会 共话AI推动教学创新路径
近日,上海举办了一场围绕智能技术与教育融合发展的学术会议。与会专家与教师共同探讨了如何借助新兴科技推动教学创新,构建适应数字时代的教育新环境。本次活动由多家教育研究机构、学术团体及企业联合筹办。会上,上海市教育学会负责人指出,人工智能正在深刻改变传统教学形式,推动教育向个性化和均衡化的方向发展。来自
-
制造企业理性布局人工智能 技术扎根产业求实效
当前,人工智能正从概念探讨加速融入实体经济,成为驱动制造业革新的关键力量。在氟化工行业处于领先地位的多氟多公司,较早启动了智能化转型,构建了一套涵盖数据基础、场景应用与产业融合的完整实践体系。位于河南的氟基新材料研发基地内,一面醒目的元素周期表勾勒出企业的技术布局——其产品深度关联了表上前段多个关键
-

人工智能角逐推升资金投入,全球数据枢纽布局加速扩张
标普全球最新统计指出,本年首十一月,全球范围投向数据枢纽的资金累计已接近610亿美元,超越上年总额,刷新历史纪录。行业分析指出,科技领军企业及基建开发商正全力扩充数据处理能力,以应对由智能技术发展带来的庞大运算需求。一、“当前投入仅为开端”数据显示,数据枢纽建设正进入高速扩张阶段。今年前十一月达成的上百
-
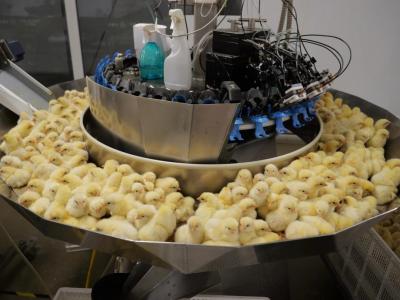
技术赋能养殖业 松桃智能养鸡助农增收
在松桃太平营街道的一家禽苗培育场内,近期一批禽苗正装箱运往外地。养殖区里,设备自动运转,环境调控系统持续监测,确保孵化条件稳定。这座现代化养殖场目前有大量种蛋处于孵化阶段,雏禽不断破壳,展现着当地养殖业的活力。自引入重点企业后,松桃蛋鸡养殖逐步走向科技化与规范管理。通过采用自动喂养、光照调节、环境监